Operating System Virtualization
These notes will attempt to describe how operating systems virtualization (henceforth to be termed ``virtualization’’) is implemented. There are essentially two approaches in use today: hardware assisted virtualization and paravirtualization. We’ll discuss them in terms of their most prevalent open source examples: KVM and Xen.
Virtualization, like many terms associated with cloud computing, is often ill defined. For the purposes of this course (and as a good benchmark definition) virtualization is
the process of abstracting the physical machine hardware to the point where it is possible to run a full operating system using the abstractions only.
That is, a virtualized system is one in which the operating system “thinks” it is running “alone” on a physical machine, but instead it is controlling abstractions in place of the physical hardware.
Even this definition is a bit tricky since Intel introduced hardware support for virtualization. These extensions to the x86 architecture implement in hardware “abstract” versions of other hardware features (like page tables) calling into question the definition of the word “abstraction.” From a processor architecture perspective, then, virtualization is the isolation of physical machine resources such that a full machine operating system can use the resources independently as if they machine were dedicated to it.
From a systems design perspective, virtualization is the notion that the operating system (and not the process) is the resource container. That is, each operating system believes it has full control over a set of machine resources and some other “system” (usually called a hypervisor) is able to arbitrate sharing among operating systems (in a way analogous to the way in which an operating system arbitrates sharing among processes). The Linux containers community might take exception to this last definition but so be it.
Virtualization (as it is commonly implemented today) attempts to meet two requirements:
- resource arbitration: virtualized systems share a common set of physical resources according to a set of policies that must be arbitrated
- isolation: because operating systems are designed to be the software that implements hardware control, virtualization must ensure that virtualized operating systems cannot interfere with each other through manipulation of the hardware resources.
There are generally four approaches to virtualization:
- hardware emulation – The hardware an operating system uses is really a software interpreter (including JIT capabilities) of hardware instructions that the operating system issues.
- hardware assisted – The hardware includes support for virtualization that can be used to implement operating system isolation without the “cooperation” of the operating system.
- paravirtualization – The operating system being virtualized includes functionality (i.e. “cooperates”) in a way that allows it to be run in isolation.
- containers – Not properly an operating system isolation technique, containers are none the less often discussed along with OS virtualization. Containers implement isolation within one operating system in a way that allows each user to “believe” she has a dedicated “copy” of the operating system alone.
These methodologies have had different implementations by various vendors. For example, VMware’s proprietary virtualization technology began as hardware emulation but is today implemented via hardware assist. Sun Microsystem’s Zones are a Solaris container solution that has morphed into an open approach for Linux called OpenVZ.
Today, the most widely used virtualization technologies are VMware, KVM, and Xen. There is also significant and growing interest in Linux containers in the form of LXC and Docker. This statement, in no way, is intended to pass judgment on the value of alternative technologies. It is just a statement about popularity.
Isolation
At the root of all virtualization approaches is the need to provide isolation. Even to implement effective resource arbitration, some degree of isolation is necessary or participants will be able to subvert what ever sharing mechanisms are in place.
In an unvirtualized setting, the job of implementing isolation falls to the operating system and the unit of isolation is the process. That is, each user can launch one or more processes that she “owns.” Within each process, the user appears to control all resources (memory, cpu, network connections, etc.). Outside the process, however, the operating system implements mechanisms that allow multiple processes to share the resources (memory, cpu, network, etc.) of a single machine. This sharing is a form of isolation because the actions a program takes within a process do not need to take into account the existence of other processes. For example, the cpu registers that implement the memory stack appear dedicated to the process and, as a result, the program does not need to guard itself against another user’s use of the stack.
Process isolation simplifies program development and, in some cases, improves software engineering (by isolating software faults).
Modern hardware provides support for process isolation using two built-in facilities: memory protection (typically via virtual memory) and system calls. Memory protection allows the operating system to dedicate a portion of the physical memory to a process and (most importantly) to reclaim that memory from the process when the operating system need to give it to another process. System calls allow a process to transition control flow into code that is trusted to control the hardware directly according to the isolation specifications. Thus a process executes code in a protected memory region. When that code need to manipulate shared hardware resources in a way that might allow it to violate the isolation properties of the operating system, it makes a system call to trusted code that first checks the access and performs it only if it is within specification (e.g. the process is accessing disk sectors according to the permissions scheme implemented by the OS).
To implement OS virtualization, the system must have access to analogous functionality. It must be able to provide memory protection between virtualized operating systems (that are otherwise given autonomous control over their memories) and it must provide a method of transitioning control flow into trusted code when an OS wishes to perform an operation that could possibly violate isolation.
In general, a virtualization methodology must
- isolate memory between operating systems
- provide control operations that allow the creation, destruction, and access control of operating systems
- isolate I/O so that operating systems can access I/O devices as if they were dedicated.
Thus when analyzing an OS virtualization system, one should ask three high level questions:
- How is memory isolated?
- How is trusted control implemented?
- How is I/O implemented?
We’ll look at the answers to some of these questions for a couple of virtualization systems. In what follows, we’ll use the term “hypervisor” to refer to the software that is responsible for implementing OS virtualization and “guest” or “guest OS.”
KVM
What follows in the discussion of KVM is due to several sources all of which are excellent in their own way. I do not cite them specifically but, instead, encourage you to use them together (as I have) to understand KVM.
- The KVM source code
- @braoru’s KVM presentation
- Stefan Hajnoczi’s KVM presentation
- IIT Class project by Senthil, Puru, Prateek, and Shashank An unattributed paper on the BHyVe hypervisor
I’ve borrowed liberally (particularly with respect to figures) from these sources.
KVM (Kernel-based Virtual Machine) is an open source virtualization technology currently supported by the Linux kernel for the x86 architecture. It is based on an earlier (and more portable) system called QEMU (see another wonderful tutorial by Steven Hajnoczi) that uses a software emulation which (while portable) carriers a significant performance penalty. KVM relies on virtualization hardware facilities that are now available for many (but not all) of the Intel processors that are compatible with the x86 instruction set architecture. Intel terms these capabilities “Intel VT” and they come in the form of “VT-x” and “EPT.” The community typically refers to these as “HVT” for “hardware virtualization technology.”
KVM uses VT-x to implement protected state transitions between a guest and the hypervisor. With VT-x, the processor defines two new protection modes: host mode and guest mode.
Intel VT-x
To see how these new features interact with the x86 it is instructive to review how an unvirtualized OS is implemented. The x86 ISA defines protection rings that allow an unvirtualized operating system to implement system calls. A user process runs in ring 3. Certain instructions (like those that manipulate memory protection features) will not be executed when the processor is running in ring 3. All such instructions will run in ring 0, however. One of three things happen when a process in ring 3 tries to issue an instruction that is a ring 0 instruction:
- a fault occurs
- the process issues a trap indicating that it wants code in ring 0 to issue the instruction on behalf of the process in ring 3
- nothing
It is this last option that turned out to be most troubling. If all “protected” instructions generated a fault in ring 3, then it would have been possible (one suspects) to implement VT-x functionality without extending the ISA. However, the original ISA specification includes “quiet” no-ops for certain protected instructions making it difficult to implement OS virtualization.
Thus Intel added host mode and guest mode. In each mode, the processor can be set in any ring. However protected instructions from Guest-0 generate faults that can be checked in host mode.
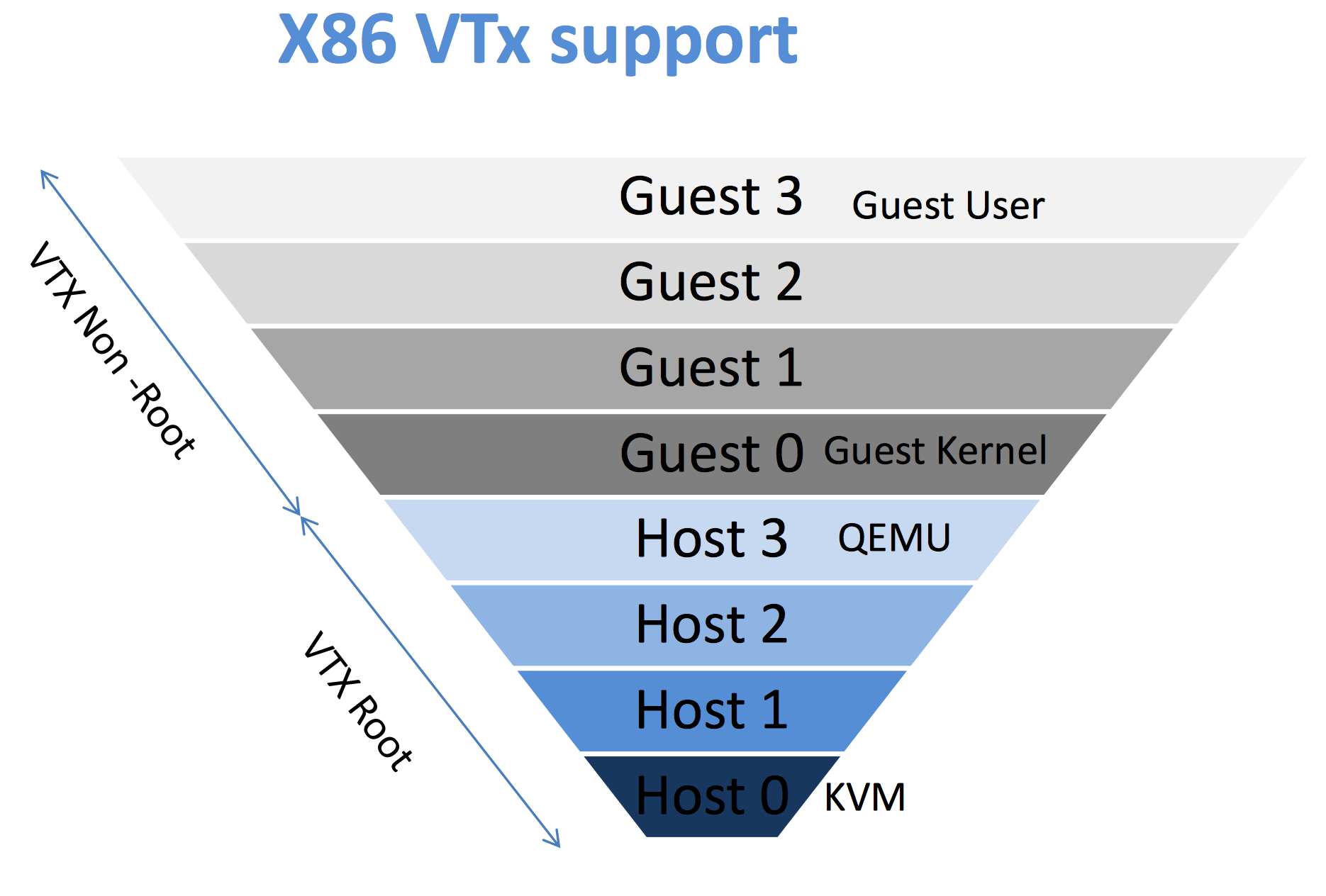
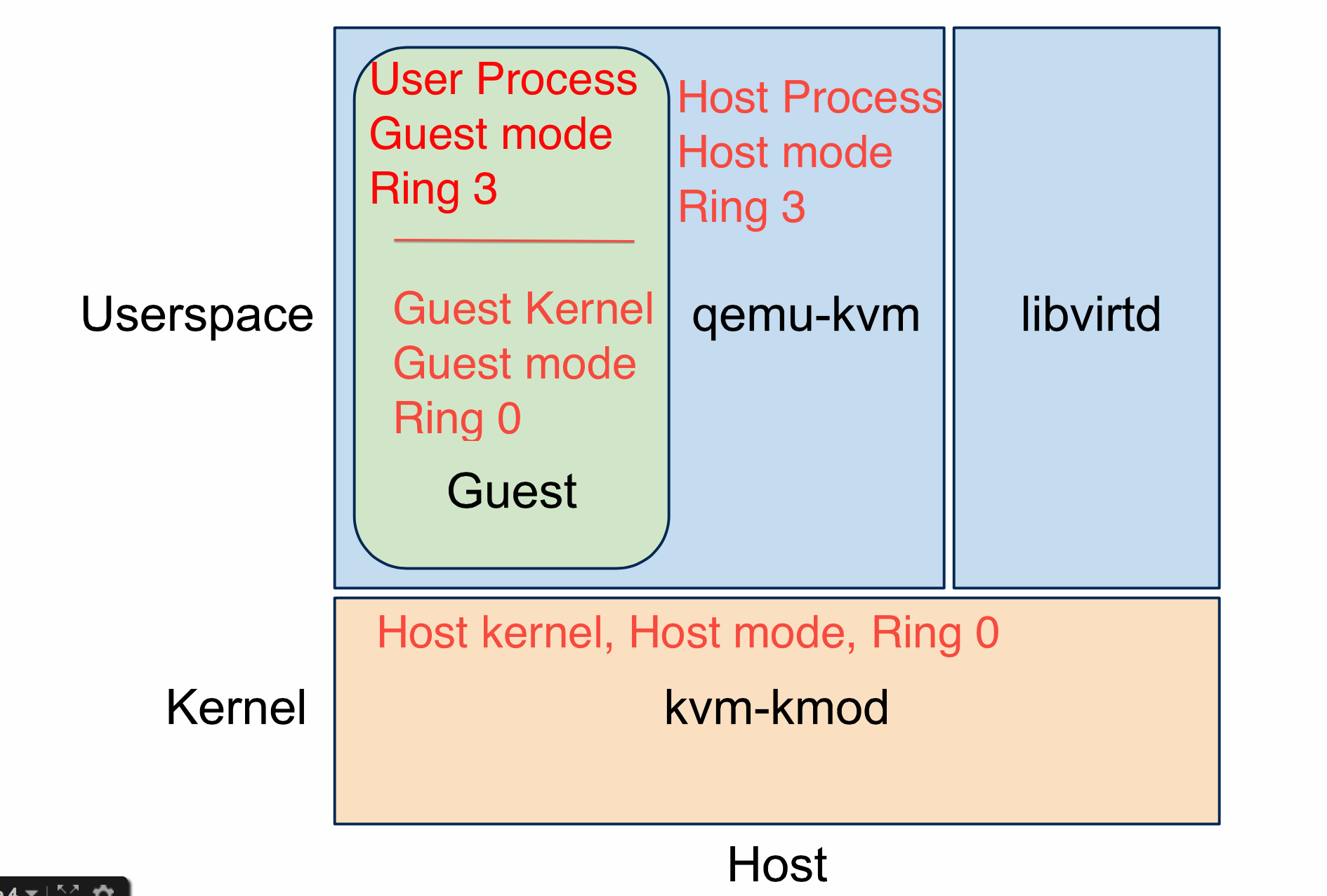
The main idea behind KVM is to run a process on the host OS that KVM turns into a guest OS. To do so, a host OS process loads up the code for the guest that is necessary and then “launches” the VM in the correct guest mode ring level. Using the hardware triggers provided by VT-x, KVM (host ring 0) directs privileged events to QEMU code (running in host ring 3). If you are stuck with the Linux process model in your head, then the way to think of this is
- A user process in a guest OS is a process
- there is a kernel in the guest OS that implements process isolation
- there is a host kernel that handles guest OS isolation
- there is a process (QEMU) running on the host that runs much of the code to keep the kernel on the Host OS from being too bulky
The state management via VT-x is relatively straight forward in that the extensions define a data structure to consult (set up in Host mode) when making transitions.
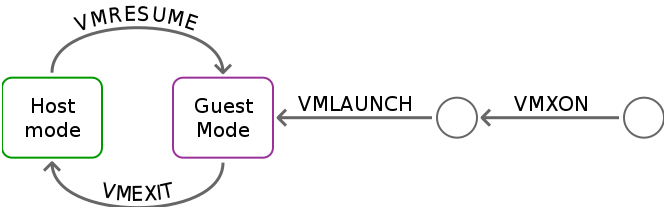
When the guest requires service when either
- there is an operation that the hypervisor must perform, or
- something in the guest (say a system call made by a process running in the guest) demands that the guest access the machine hardware.
KVM gets control via VMEXIT when the guest “traps” out of its usual operating mode for either of these reasons. Either it handles the request (in the case that it is a hypervisor function) or it forwards the request to the host’s kernel for service (in the case that it is a hardware access function). In this latter case, KVM gets control again so that it can deliver the requested host kernel functionality to the guest.
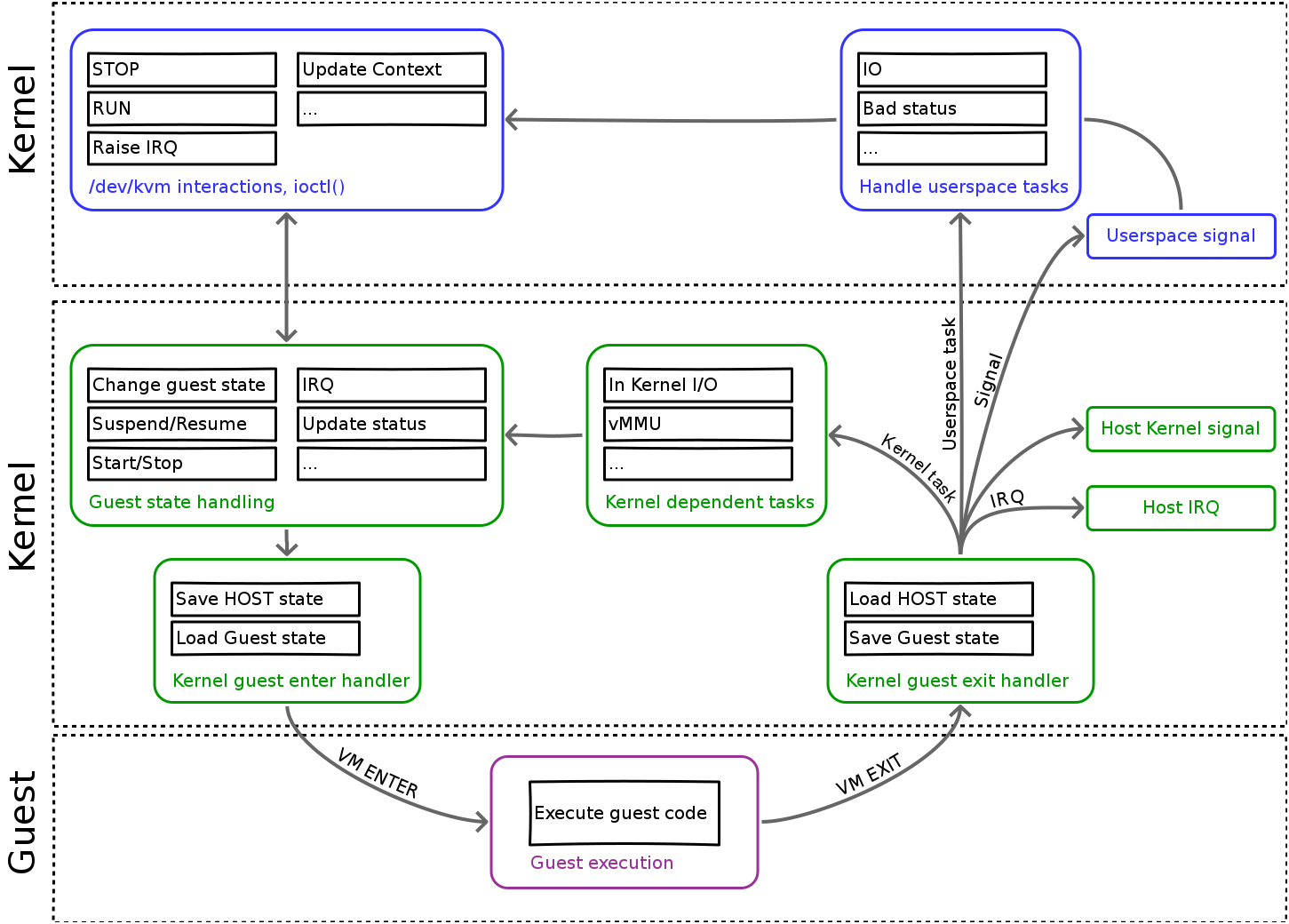
In the case of hypervisor functionality, unless it is a simple kernel function, KVM pushes the actual processing into a user space process (QEMU) by returning from a system call that the process has made that has been blocked. When QEMU handles the request, it calls back into the host kernel via the system call.
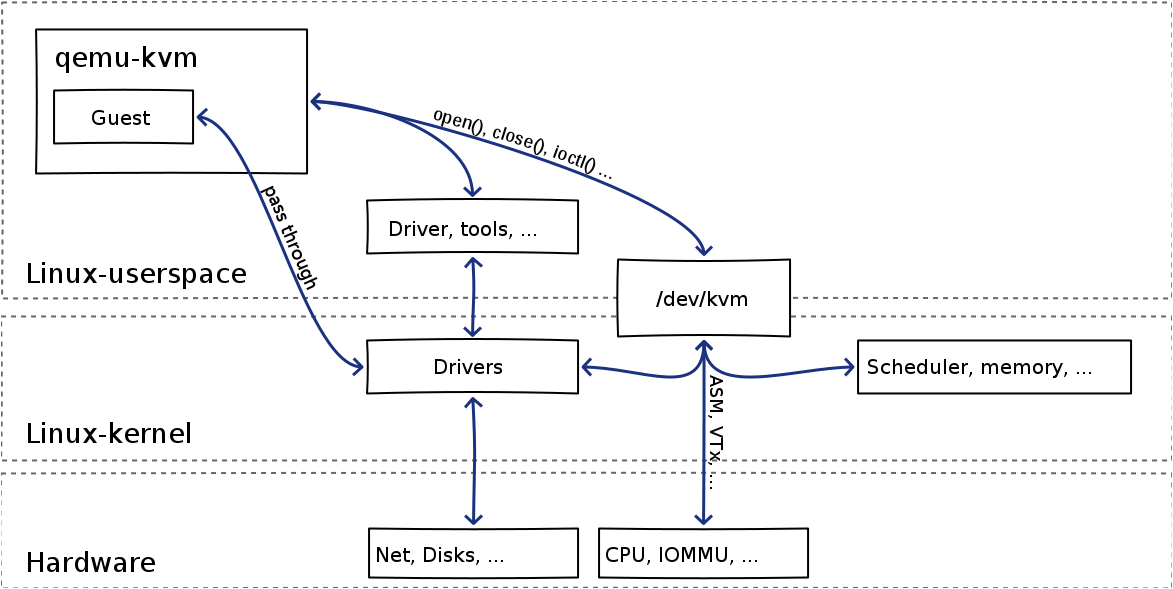
This previous discussion outlines the control flow relationships between a guest process, a guest kernel, KVM, the host kernel, and a host process (that contains the guest process, the guest kernel, and the QEMU code). Notice that the goal of KVM is to make a guest OS “look” like a regular process to the host OS since most of the functionality needed to service the guest is actually available in the host. Notice also that the guest doesn’t “know” it is embedded in a host process because the VT-x support handles transitions into the hypervisor when ever the guest might be doing something that requires privileged control.
This high-level description is intended to cover control flow transitions. Notice that in an operating system, control flow can take many forms, almost all of which are asynchronous from the perspective the operation system kernel (guest of host). For example, when the hardware timer interrupts, it throws an interrupt to the host kernel. That interrupt may also need to be vectored (dispatched) to a guest kernel that need to keep track of the time as well. KVM in the host is responsible for handling interrupt dispatch. It uses the VT-x extensions to transition between host mode (where the interrupt is initially fielded) and guest mode (where the guest kernel’s interrupt handler must be executed). When KVM initializes a kernel, part of the boot-up process is to record how interrupt dispatch is to be implemented for the guest.
And then, there is memory
As discussed earlier, control flow is only part of the isolation picture. Another important part is the way in which the guest and host memory management systems interact. In particular, on an unvirtualized Linux system, the virtual memory implements memory isolation at the process level. A process wishing to grow or shrink its memory or to change its memory’s permissions must ask the kernel to do so on its behalf (operations that manipulate memory objects are privileged instructions). What is less clear but equally true is that all instructions that touch memory are checked (very fast) by the hardware to ensure that they are
- in bounds
- conformant to the permission specifications
In the case where a memory access (read or write) fails to meet the kernel’s legal criteria, a fault is thrown which (under Linux) usually results in the process being terminated.
In addition to governance, the memory system also implements efficient resource utilization in the form of demand paging. When a legal page from a process is needed and is not already present, the process throws a page fault that the kernel catches and services.
The key data structure for implementing process memory management is the page table. The page table format for the x86 is defined (it is a two-level hierarchy) by the architecture. Thus, each legal page of process memory is described by two page table entries – a page directory entry (top level) and a page table entry – that are check on every memory access.
To make this checking fast, each processor version also includes a TLB that caches recently used page directory and page table entries. The implementation of the TLB varies but it in each case it is designed to short-cut a full page table lookup if the mapping information has recently been accessed.
Herein lies the rub.
The x86 architecture is designed with the notion that there is one page table and one TLB per operating system. Worse, each page table entry refers to a physical frame number in the machine’s memory. Thus each guest will believe that it has the ability to use all frames in the physical memory – a situation that the hypervisor must prevent.
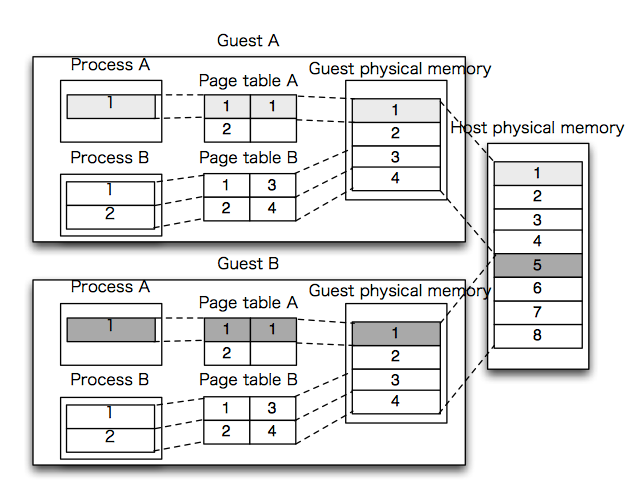
In the case of KVM-style virtualization, however, each guest has a page table as does the host. Further (unlike in the control-flow case) it is not possible to interpose KVM on each memory access because the access checking is done strictly in hardware.
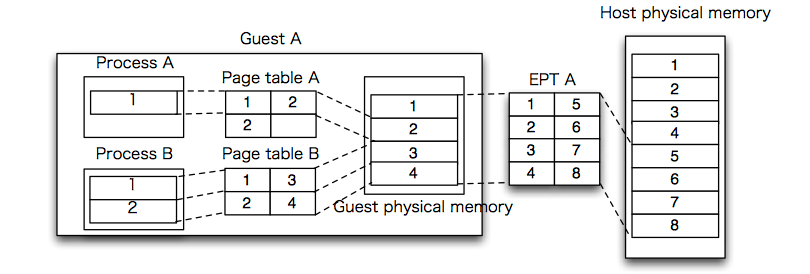
KVM relies on another Intel VT feature called the “Extended Page Table” (EPT) to resolve this difficulty. EPT allows the host kernel to set up a “shadow” page table in the processor that gets used when the processor is running in guest mode. It is a shadow page table in that it gets used by the hardware to check memory accesses (like a true page table). However, the references in the shadow page table are to host page table entries (the host page table essentially forms another two levels of hierarchy). Thus, the host can maintain one, large page table that it partitions among guest page tables, each of which “believes” it has the full, unshared memory space.
TLB management in the case of EPT is a joy, to put it mildly. Notice that “the” TLB for the machine now needs to handle shadow mapping and host mapping. Worse, when a guest VM is descheduled because another guest is to be run, the TLB entries for the old guest must be invalidated. In an unvirtualized setting, the TLB is usually flushed at process context switch time for the same reason. However, with an extra level of indirection, a full flush can cause a serious performance problem. Thus EPT (in some implementations) also implements a tagged TLB which allows the hypervisor to decide on exactly which TLB entries to flush when guests are switched.
Final Notes on KVM
This presentation is a little backwards from what it would be in a class on virtualization in the sense that it describes Intel VT functions in terms of what KVM does. Indeed, the subject is richer than just the KVM picture might make it seem. First, Advanced Micro Devices implements hardware virtualization support as well in its x86 compatible processors. Indeed, many believe that AMD’s original AMD-V set of extensions were (and are) superior to Intel’s. When you study virtualization for the sake of virtualization, you should consider the similarities and differences between the two for the x86. KVM can use either Intel VT or AMD-V to implement the same functionality using the same software architecture.
The careful reader at this point may be troubled by the lack of a discussion of I/O in KVM. This omission is intentional and for the sake of brevity rather than due to negligence or maliciousness. KVM’s original I/O model was designed to support “full” virtualization in the sense that the guest OS did not need to cooperate. To implement full virtualization, the I/O devices had to be emulated at a very low level so that guests would be able to use their own native device drivers without modification. Thus the original KVM contained software emulations of hardware Ethernet cards and SCSI disk controllers that “pretended” to be physical hardware devices. While flexible, this approach suffered from I/O performance penalties that led the KVM community to move away from full virtualization for I/O. Virtio is an effort to use paravirtualization (described below in the context of Xen) for I/O as a way of alleviating this performance issue. The non-paravirtualized KVM I/O features are still available, but the rumor is that they are being phased out as support for Virtio makes it into other operating systems (like Windows).
Xen
Much of what follows regarding the implementation of Xen is due to David Chisnall’s “Definitive Guide to the Xen Hypervisor”. There certainly have been developments in the Xen community that have occurred after its publication. This lecture is intended to cover only the basics of the internals at a reasonably high level.
Virtualization is generally thought of an an IBM invention from the early 1970s. More recently (mid 1990s), VMware implemented virtualization for the x86 hardware using several different techniques (the industrial versions of which being similar to KVM’s approach). However, the first technology to make virtualization available as open source at a large scale was Xen. Like VMware and KVM, Xen’s technological goals for virtualization were to implement isolation at a level of abstraction that could permit operating systems to function independently of each other and of their host.
However, the Xen approach differed from VMware and KVM (QEMU) in a few important ways. First, Xen was concerned, primarily, with the performance of virtualized operating systems. At this time it was founded, hardware support for virtualization was not widely available meaning that some form of software emulation was needed. VMware used (among other techniques) binary rewriting of guest OS code to insert emulation and QEMU was simply a full emulation system (although it also adopted binary rewriting in very clever ways). These techniques permitted full virtualization but there was concern within “the community” that they were too slow to be of practical use on an industrial scale.
To meet the performance challenges as they saw them, the Xen team decided to sacrifice the notion that a virtualized guest could be hosted without modification. That is, Xen decided not to implement full virtualization but, instead, to implement paravirtualization which relies on changes to the guest. The key idea centered on changing the way in which each guest OS interacted with the x86 protection mechanisms so that isolation could be implemented without additional hardware extensions.
The basic concepts behind Xen are deceptively simple. The goal was to run the guest in ring 1 of the x86 protection hierarchy. As with KVM, Xen had to solve the problems of
- implementing privileged instructions issued by the guest(s) in a protected way (in ring 0),
- the problem of implementing memory isolation between guest operating systems, and
- implementing isolated I/O using shared machine devices.
Unlike KVM, however, they relied on code changes to the guest kernel to implement features in a way that ensured good performance (better than with emulation techniques).
Unsurprisingly, the Xen architecture is also different than KVM’s
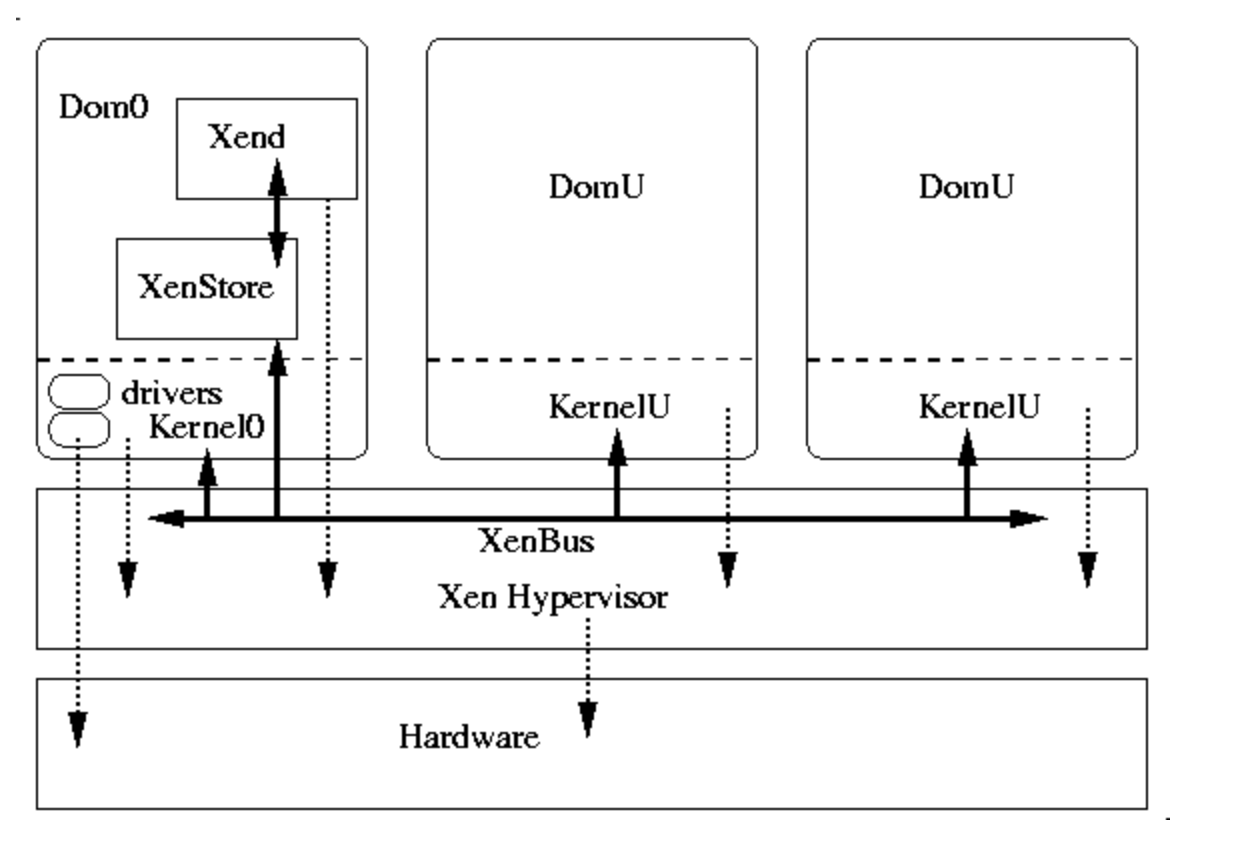
The guest is not logically a process from the perspective of the host. Rather, each guest runs independently on the hypervisor which (in theory) is the control software for the host. That is, there is no host OS running in ring 0. Instead, the hypervisor runs in ring 0, and each guest runs in ring 1.
If implemented completely literally, this architecture would require the hypervisor to include device drivers and user-interface code to allow guests to access hardware resources and to control the system. To avoid this complexity, Xen allows for a “special” guest to be specified (called “dom0” – pronounced “dom zero”) that also runs on the hypervisor. Guests, in the Xen parlance, are each termed “domU” to indicate that they are each a user “domain.”
Under Xen, dom0 serves two purposes:
- it runs the device driver code necessary to actuate the hardware devices
- it runs the user-interface code necessary to instantiate and control other guests
Thus the Xen hypervisor either services requests directly from its guests or routes those requests (after checking them for validity and security) to dom0 which executes them on behalf of the guests.
To implement privileged control flow, each guest must be examined and modified so that each ring 0 instruction that cannot run in ring 1 be translated into a trap to the Xen hypervisor. The binary rewriting techniques discussed briefly in the previous section perform the same function, but at the instruction level without changes to the guest source code.
Xen’s approach was to mandate that all such changes be made at the source level in the guest and that the guest be recompiled for execution with a Xen hypervisor. Working at the source level is, in some sense, easier since the operating system source explicitly encodes its privileged operations. Further, well modularized operating systems typically group these privileged operations together into a common set of modules, both to promote portability (these are typically architecture specific) and robustness (they are shared among all OS subsystems).
One often overlooked issue with this approach is that it also changes the failure modes of the guest. In a full virtualization setting, the guest either runs or it appears to the guest that the hardware has failed. Under Xen, a guest may have misimplemented its Xen-specific code but otherwise be intact. Xen needs to ensure that any misimplementation in the guest does not compromise the overall system and also that the guest fail gracefully due to such a misimplementation.
All privileged instructions that must be implemented securely in ring 0 must be replaced in the guest with a special kind of system call termed a hyper call. Like a system call, a hyper call pushes arguments on the stack (or marshals them in registers for speed) and then issues a “trap” instruction that causes the processor to switch to ring 0 and to jump to a well-known (and trusted) location so that the hyper call can be serviced. That is, a hyper call is really just a system call that a guest OS makes from ring 1 to ring 0 in (more or less) the same way that a guest process makes a system call from ring 3 to the guest OS in ring 1.
Notice that traps themselves may need to be changed and also that interrupts must be vectored by the hypervisor in the same way as they are under KVM. However, because the guest can be changed, rather than intercepting them, Xen implements an event system that guests use to ask the hypervisor for interrupt support. Thus, interrupt code in the guest falls under the broad rubric of “privileged” code that must be modified. We’ll discuss this issue further in the section on paravirtualized I/O.
Xen and memory
Xen’s approach to managing memory isolation is also relatively straight forward to understand at a conceptual level (the implementation, however, is quite another matter). The key realization is that x86 page tables can be used directly by the guest as long as updates to page table entries are handled by Xen in ring 0. Put another way, as long as the guest starts in a protected state (Xen sets up its initial page table entries securely) as long as the guest asks Xen to implement any updates to the guest page tables, and Xen checks these updates, the guest can use the page tables directly.
Thus Xen mandates that the guest change all of the code that attempts to write data into a page table entry (page directory or page table) to make a hyper call instead. It enforces this restriction by making the memory used to implement the page tables read only. Thus an attempt by a guest to write its page tables directly will cause a fault (which the hypervisor catches).
The other part of Xen cleverness with respect to memory management has to do with how it manages the virtual to physical mapping of memory. With HVM, Xen supports shadow page tables (in two different ways). Without HVM, however, it allows each guest to “see” the physical frames in memory it has been allocated. When a guest needs a physical frame, it requests one from Xen and Xen expects that the guest will keep its own mapping of how that frame is used.
One way in which the frame is used is in a page table entry. When a guest creates a virtual to physical mapping in a page table entry (as noted above) it must request that Xen update the page table on its behalf. Xen checks to make sure that the physical frame number specified in each update is “legal” for that guest (i.e. that the guest owns the physical frame).
This technique will work in any situation where the guest must use a physical memory address as long as the guest requests state updates from Xen. For example, a guest that wishes to initiate a DMA will supply a physical frame number, but Xen must be able to check that the guest owns the frame before sending the DMA request to the machine’s DMA controller.
Xen Paravirtualized I/O
One of the problems that an operating system virtualization system must solve is that of providing isolated I/O to guests via a common set of shared physical devices. It is possible to emulate I/O devices in software and then to instrument each emulation so that I/O is isolated (the initial KVM approach). Xen, however, requires that the guests modify the device drivers they use to allow protection and isolation characteristics to be inserted.
The approach is called “The Split Driver” model. Each device is controlled by two drivers (one used by the guest and one used by dom0) that work together. The model is essentially an RPC-like model in which a client operates an interface that marshals arguments and communicates them in a canonical transport format to a server that unmarshals them and executes any commands that are contained therein. Results from the execution are marshaled and communicated back to the client where they are unmarshaled and presented to the user.
In Xen, the guest driver (called “the front end”) is analogous to the client in an RPC setting. It is responsible for implementing the driver’s interface to the guest and for communicating device requests to the “back end” of the driver running in dom0. The back end operates the specific device and returns what ever results are needed by the front end to communicate to the guest.
The communication mechanism between front end and back end is a combination of shared memory, queuing, and asynchronous events. Xen includes a facility (called Grant Tables) that allows access controlled sharing of pages between domains (all domUs and dom0). Thus one domain can send a page to another by allowing it to be unmapped in the sender and mapped in the receiver without the overhead associated with copying the data. Xen split drivers use this technique to send data between the front end and back end and vice versa.
Each data transfer is associated either with a request event or a response event. Further, most (but not all) devices implement essentially a write/read model of I/O (from the perspective of the guest). Thus the guest initiates an I/O by writing a request from the front end to the back end. The back end reads these requests, services them with respect to the device, and writes a response that the front end later reads.
Requests and responses are managed in a ring that logically lives in Xen’s memory. The ring only contains event descriptors (the data is moved separately using shared pages if possible). In addition, both the front end and back end portions of the driver can register a call back for Xen to run when a descriptor requires processing.
It is through this event delivery mechanism that Xen achieves I/O virtualization. Event are delivered over “channels” that are set up in the hypervisor so that each guest appears to have exclusive access to the devices configured in the system. The event mechanism ensures that requests from one guest are not delivered to another nor is it possible for one guest to pretend to be another. The front end of the driver must also be modified to trigger any necessary interrupts in the guest in response to event delivery.
Like with KVM, this high level description does not portray the complexities associated with the implementation of these concepts. The x86 architecture is really several architectures (some legacy) all of which must appear to function properly when executing a virtualized guest. The details associated with this proper function are, to be sure, non trivial.
Final Notes on Xen
Xen was and is a controversial technology. Originally, the notion of paravirtualization was thought to be too onerous an engineering burden for Xen to achieve wide-spread adoption. That prediction did not come to pass, however, both as the main line Linux kernel picked it up and the various Linux distros (Fedora, Red Hat, Suse, Ubuntu, Gentoo, etc.) agreed to support it.
Then, for reasons that are somewhat obscure, the two main Linux distros (Fedora/Red Hat and Ubuntu) dropped Xen support in favor of KVM. There is some debate among The Clouderati on the importance of Linux distros in the time of cloud. The shift in popularity from Xen to KVM was, in part, driven by the decision to drop support in just two of the distros, which is a fact worth considering.
Currently, it seems that Xen is back in Fedora 16 and Ubuntu (at least, at some level).
From a performance perspective, the Direct paging scheme described above (paravirtualized memory without HVM) was considered too slow for many Linux functions (like fork) that required large numbers of page table updates. Xen’s HVM support is faster, but (like KVM) it really depends on having a good TLB hit rate to get close to native speed.
Contrary to popular belief, paravirtualized I/O seems to be best practice for open source Linux device drivers. Much of the resistance to paravirtualization was centered on the perceived inability to use it for proprietary operating systems like Windows (because they are not open source). Windows support for Virtio is now available, however, so that impediment seems to have been specious.
Linux Containers
At this point, hopefully it is clear that both KVM and Xen are “machine” virtualization approaches. That is, they present an abstract version of a machine (the x86 arcrchitecture in the KVM case) to a guest OS that is isolated from other guests running on the host.
There is another way to look at the problem of isolation, however, and that is from the perspective of the user and/or the process. A user of a virtualized operating system is, fundamentally, running a process. It is possible to consider a virtualization approach that isolates a process rather than the operating system in which the process is running.
This approach is the one that is implemented by Linux containers. There have been other container approaches (Parallels is perhaps the best known) but LXC is the current leading technology with respect to the main line Linux kernel and distros.
The main idea behind Linux Containers in general, and LXC in particular, centers on the notion that processes can be made to implement user isolation in a way that provides a similar degree of user control that OS virtualization does. Specifically, one of the advantages of OS virtualization is that it allows each user to run as root in her own OS. At worst, a user can damage her own OS instance by misapplying root privileges but such effects are restricted to the instance by the hypervisor.
If the user could be given root, she could manage her process tree as if she were “the root” in an OS if her actions as root are isolated.
Thus the goal of Linux containers is to implement an isolation mechanism that is comparable to OS virtualization using the Linux process abstraction.
LXC
Much of what following comes from Rami Rosen’s excellent presentation on LXC.
LXC is an amalgamation of several Linux features including
- cgroups – a facility for resource partitioning in the kernel
- namespaces – kernel level name control
- apparmor – capability-based mechanism for implementing fine-grained permissions
- seccomp – sandboxing capability
- chroot – directory structure partitioning scheme
Fundamentally, LXC implements namespace isolation and then uses cgroups to try and provide some form of performance isolation.
What’s in a Name?
Namespace isolation is a fairly simple concept that is hard to implement in Linux. Conceptually, it is an extension of virtual memory. A process can only access memory it can address and virtual memory uses a secure mapping function (controlled by the kernel) to prevent it from addressing memory outside of its permission domain. Namespaces extend this mapping idea to all other resources that a process might access (except file descriptors which are already implemented via a secure kernel map). Thus when a process accesses a machine resource via a “name,” the kernel ensures that the resource belongs to the process by indirecting the name dereference through a kernel map.
Moreover, the kernel maps can ensure that different processes use the same name for separate machine resources, thereby implementing isolation.
For example, namespaces allow a process to change the the Linux hostname that it (and all other subprocesses) get back from a call to gethostname() without changing the host name that other processes get. Without namespaces, the kernel keeps a record of the hostname for the host. A call by root to change the host name changes it for the entire system and all calls to get the host name return what ever the current value is.
With name spaces, a process (as root) can change the host name and only it and its descendants will see the change. All other processes are unaffected.
Linux currently implements namespaces for six types of resources:
- mnt – mount points and file systems
- pid – processes
- net – networking
- ipc – Systems V IPC
- uts – unix naming
- user – user IDs
Some of these are trickier than others. For example, the net namespace must provision a completely separate network stack (in terms of state variables) in the kernel. Networking is fairly stateful (routing tables, IPtables rules, device interfaces, etc.) making this task fairly extensive.
However, with namespaces in place, it is possible to create a process (say when a user logs in) that has a complete set of Linux “names” allocated to it that can be changed from within the process (thereby affecting all children) without affecting other processes. In particular, using chroot, it is possible to make the file system that the process sees as the root file system look like the root file system of an unvirtualized Linux system. The boot code and logic won’t be effective, but all other Linux functions can then execute within the namespace as if they are running on a non-isolated kernel.
LXC does all of the housekeeping (and there is a great deal of it) necessary to create a namespace that can run a full Linux distro as if the distro were running alone on a Linux kernel by itself.
cgroups
Namespaces provide logical isolation meaning that processes running in separate namespaces have access to resources as if they are running on separate machines. However, all processes (regardless of name space) share the same kernel running on the machine – the kernel that implements the name spaces.
The problem here is that the Linux kernel inherits from Unix exactly the opposite design specification from that which LXC is attempting to implement. That is, the original designers of Unix were trying to remove the possibility of isolation from the OS in their design (as a way of promoting sharing). LXC is, in some sense, attempting to retrofit isolation into a system explicitly designed not to support it.
Namespaces are an elegant solution for logical isolation, but because the kernel is shared, the processes can still interfere with each other because they are still sharing the same set of kernel resources. Further, Linux contains only modest kernel level features that are designed to prevent the activity of one process from affecting the performance that another gets from the system. For example, memory intensive jobs that cause the system to page to the disk frequently affect system responsiveness for all jobs. Linux does its best to try and be “fair” about system usage, but the fundamental model used by the original Unix authors is that all processes on the system are assumed to belong to a group of users that are cooperating. Thus performance isolation is not an original design feature.
Linux cgroups attempt to add the concept of performance isolation to the kernel in a way that permits fine-grained control. There are 11 different subsystems that can be controlled separately via an extensive set of configuration files. These files – together – constitute a policy specification for the cgroup that governs all processes assigned to the group. A running process can be added to at most one cgroup and it and its children will be controlled by the policies specified therein.
LXC combines namespaces and cgroups so that isolated processes will get controlled fair use of the kernel resources. That is, each separate namespace will be entitled to use a specific “fraction” of the kernel resources that are available thus partitioning the Linux machine into separate isolated Linux instances.
OS Virtualization versus Linux Containers
Inevitably, the question of which approach is “best” arises. This is an interesting question that, like most interesting questions, requires some thought.
First, it is important to understand whether a comparison should be made with respect to the intersection of capabilities or not. That is, one can ask
Given the subset of functionality that is common to all alternative approaches, which is best?
When one encounters the debate between OS virtualization proponents and Containers proponents, this is usually the form of the question that is assumed tacitly. Even then, however, the debate is not as straight forward as it might seem.
Containers are an excellent choice (perhaps the best) if the goal is to provide hosted Linux access. That is, if the goal is to provide a facility where users can provision their own Linux systems and they don’t have strong preferences for the specific Linux they need, containers work well. In particular, they can achieve much higher tenancy densities that virtual machines yielding better server consolidation.
However, the use cases for which this advantage is obvious is much more narrow than one might believe initially. For example, if the Linux usage is to host web services, the networking model that LXC implements is troublesome in that it doesn’t really allow “standard” networking configuration techniques to work. Put another way, containers are virtualized Linux access – not virtualized Linux infrastructure. If the applications running under Linux require infrastructure support, the containers are not necessarily better.
Another difference is with the ability to host a variety of different operating systems. Obviously, LXC can host Linux guests and not Windows, for example, Less obviously, different Linux distros can also be problematic due to kernel affinity. That is, each disto version is developed against a specific version of the kernel. Often, to run a version one must change the kernel to match the version compatible with the distro. All hosted Linux on a container system must share the same kernel. Thus, the container Linux can only host distro versions that are compatible with its kernel. Worse, when the container machine upgrades, it can change the distros that can be supported.
Thus, in a cloud context, determining which is “better” is a difficult task. For IaaS, clearly OS virtualization has become predominant. However, as PaaS evolves (where applications have less contact with the infrastructure components Linux exposes) containers may prove to be a better choice. It isn’t yet clear.
Comments